Chapter 5. SIFT and feature matching
In this tutorial we’ll look at how to compare images to each other.
Specifically, we’ll use a popular local
feature descriptor called
SIFT to extract some
interesting points from images and describe
them in a standard way. Once we have these local features and their
descriptions, we can match local features to each other and
therefore compare images to each other, or find a visual query image
within a target image, as we will do in this tutorial.
Firstly, lets load up a couple of images. Here we have a magazine
and a scene containing the magazine:
MBFImage query = ImageUtilities.readMBF(new URL("http://static.openimaj.org/media/tutorial/query.jpg"));
MBFImage target = ImageUtilities.readMBF(new URL("http://static.openimaj.org/media/tutorial/target.jpg"));

The first step is feature extraction. We’ll use the
difference-of-Gaussian feature
detector which we describe with a SIFT
descriptor. The features we find are described in a way
which makes them invariant to size changes, rotation and position.
These are quite powerful features and are used in a variety of
tasks. The standard implementation of SIFT in OpenIMAJ can be found
in the DoGSIFTEngine class:
DoGSIFTEngine engine = new DoGSIFTEngine();
LocalFeatureList<Keypoint> queryKeypoints = engine.findFeatures(query.flatten());
LocalFeatureList<Keypoint> targetKeypoints = engine.findFeatures(target.flatten());
Once the engine is constructed, we can use it to extract
Keypoint objects from our images. The
Keypoint class contain a public field called
ivec which, in the case of a standard SIFT
descriptor is a 128 dimensional description of a patch of pixels
around a detected point. Various distance measures can be used to
compare Keypoints to
Keypoints.
The challenge in comparing Keypoints is trying to
figure out which Keypoints match between
Keypoints from some query image and those from
some target. The most basic approach is to take a given
Keypoint in the query and find the
Keypoint that is closest in the target. A minor
improvement on top of this is to disregard those points which match
well with MANY other points in the target. Such point are considered
non-descriptive. Matching can be achieved in OpenIMAJ using the
BasicMatcher. Next we’ll construct and setup such
a matcher:
LocalFeatureMatcher<Keypoint> matcher = new BasicMatcher<Keypoint>(80);
matcher.setModelFeatures(queryKeypoints);
matcher.findMatches(targetKeypoints);
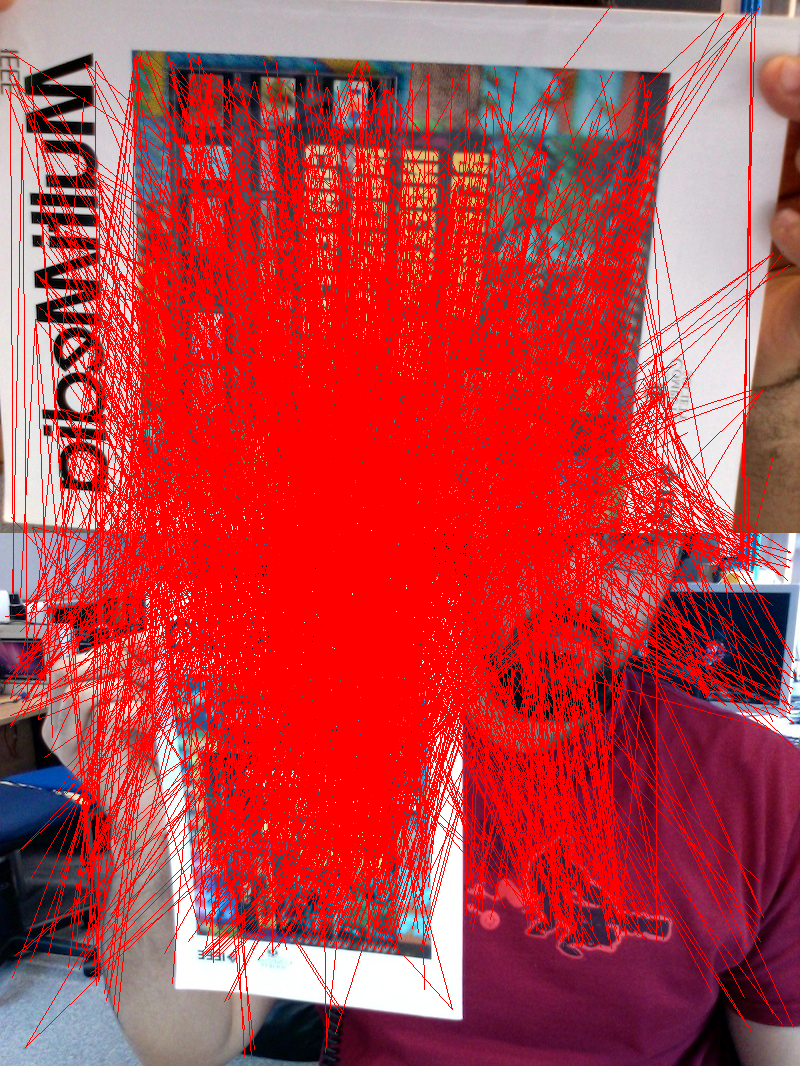
We can now draw the matches between these two images found with this
basic matcher using the MatchingUtilities class:
MBFImage basicMatches = MatchingUtilities.drawMatches(query, target, matcher.getMatches(), RGBColour.RED);
DisplayUtilities.display(basicMatches);
As you can see, the basic matcher finds many matches, many of which
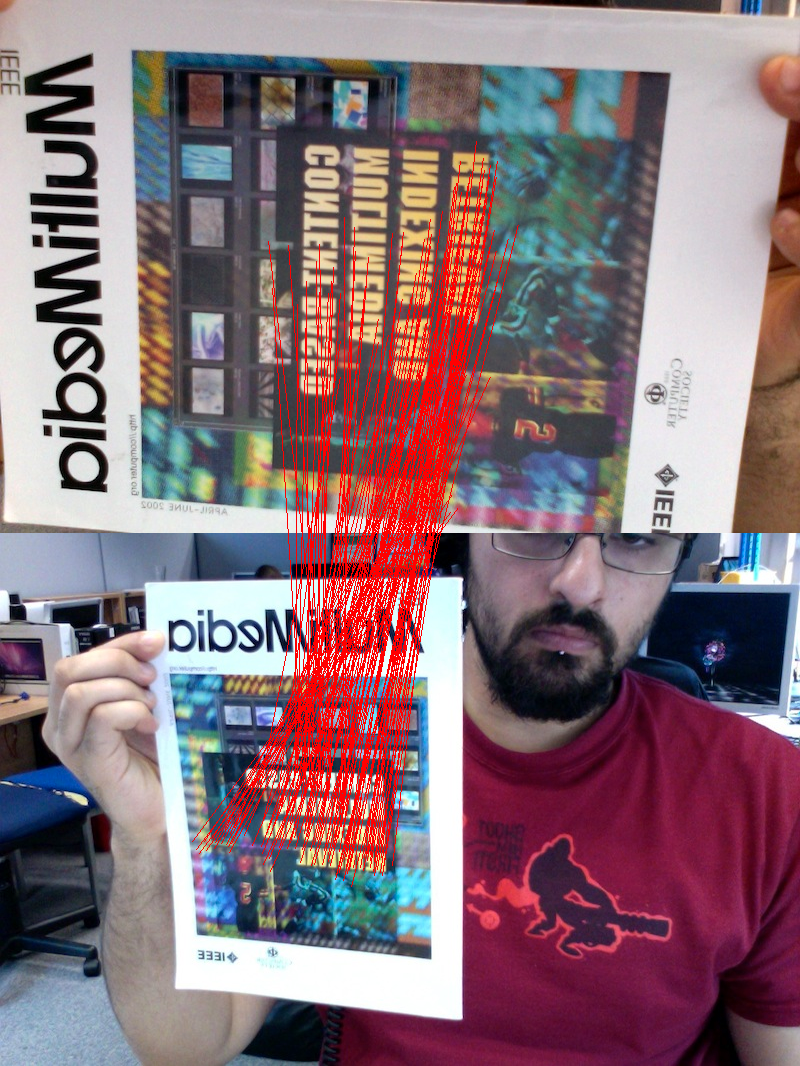
are clearly incorrect. A more advanced approach is to filter the
matches based on a given geometric model. One way of achieving this
in OpenIMAJ is to use a
ConsistentLocalFeatureMatcher which given an
internal matcher and a model fitter configured to fit a geometric model, finds which
matches given by the internal matcher are consistent with respect to
the model and are therefore likely to be correct.
To demonstrate this, we’ll use an algorithm called Random Sample
Consensus (RANSAC) to fit a geometric model called an
Affine transform to the initial
set of matches. This is achieved by iteratively selecting a random
set of matches, learning a model from this random set and then
testing the remaining matches against the learnt model.
![[Tip]](images/tip.png) |
Tip |
| An Affine transform models the transformation between two parallelograms. |
We’ll now set up a RANSAC model fitter configured to find Affine Transforms (using the RobustAffineTransformEstimator helper class) and our consistent matcher:
RobustAffineTransformEstimator modelFitter = new RobustAffineTransformEstimator(50.0, 1500,
new RANSAC.PercentageInliersStoppingCondition(0.5));
matcher = new ConsistentLocalFeatureMatcher2d<Keypoint>(
new FastBasicKeypointMatcher<Keypoint>(8), modelFitter);
matcher.setModelFeatures(queryKeypoints);
matcher.findMatches(targetKeypoints);
MBFImage consistentMatches = MatchingUtilities.drawMatches(query, target, matcher.getMatches(),
RGBColour.RED);
DisplayUtilities.display(consistentMatches);
The AffineTransformModel class models a
two-dimensional Affine transform in OpenIMAJ. The RobustAffineTransformEstimator
class provides a method getModel() which returns the internal Affine Transform model
whose parameters are optimised during the fitting process driven by the ConsistentLocalFeatureMatcher2d.
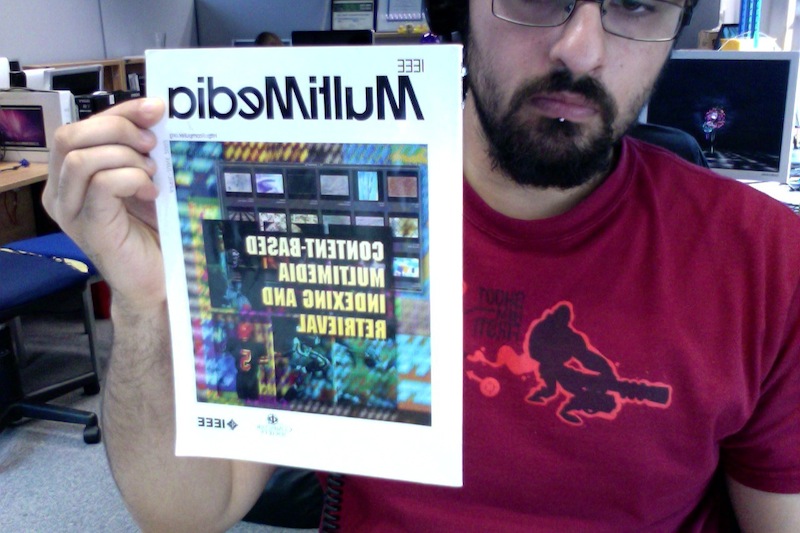
An interesting byproduct of using the ConsistentLocalFeatureMatcher2d is that the
AffineTransformModel returned by getModel() contains the best transform
matrix to go from the query to the target. We can take advantage of
this by transforming the bounding box of our query with the
transform estimated in the AffineTransformModel,
therefore we can draw a polygon around the estimated location of the
query within the target:
target.drawShape(
query.getBounds().transform(modelFitter.getModel().getTransform().inverse()), 3,RGBColour.BLUE);
DisplayUtilities.display(target);
5.1.1. Exercise 1: Different matchers
Experiment with different matchers; try the
BasicTwoWayMatcher for example.
5.1.2. Exercise 2: Different models
Experiment with different models (such as a
HomographyModel) in the consistent matcher. The RobustHomographyEstimator helper class can be used
to construct an object that fits the HomographyModel model. You can also experiment with an alternative robust fitting algorithm to RANSAC called Least Median of Squares (LMedS)
through the RobustHomographyEstimator.
|
Tip |
| A HomographyModel models a planar Homography between two planes. Planar Homographies are more general than Affine transforms
and map quadrilaterals to quadrilaterals.
|